We have published new rules for your own robot model used in simulation. Have a look in 0. Hybrid event under Contest
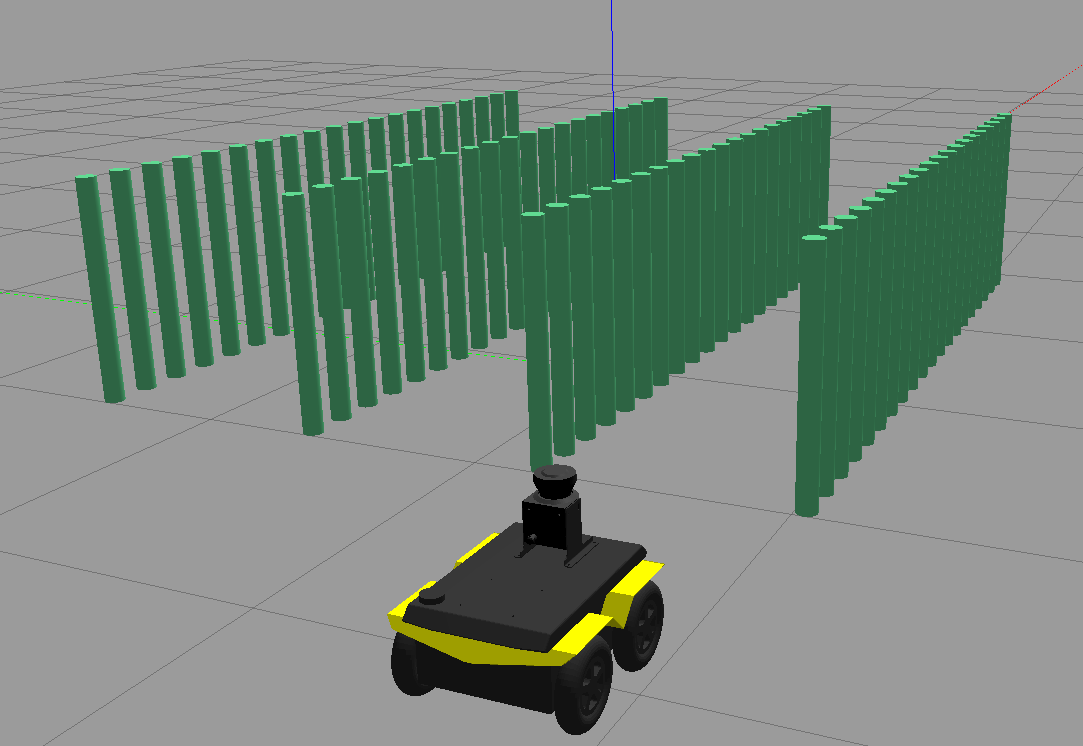
We have published new rules for your own robot model used in simulation. Have a look in 0. Hybrid event under Contest

In our first teams meeting we explained the virtual part of the event. A pdf of the presentation can be found under Downloads.

For all teams that want to participate in the 2022 event, we will organise a Zoom meeting on Friday, March 4th from 14:00-16:00.
Content:
The Zoom meeting link will be sent to the Field Robot Event mailing list subscribers.
In the meanwhile we finalised the proceedings from 2021. For those of you who want to get started with the preparation for 2022, please have a look at the team paper and descriptions in the proceedings how they started and were more or less successful with their chosen strategies. The proceedings are a good preparation because in 2022 there will be similar challenges like described in task 1, task 3 and of course task 5 from 2021. More details will be soon on this website.
Now available: All proceedings of previous Field Robot Events!
See the Downloads tab.

One of the goals of the field robot event is to learn from each other. We are therefore very happy with Kamaro’s initiative to make some of their software public. We expect this to boost our community and encourage collaboration and exchange between teams. It also helps aspiring participants to get started.
Kamaro has published their winning code for crop row navigation and their code for object detection using deep learning.
Which team is next?
CERES II showed a robotic arm in the freestyle task. This arm, completely developed and build by them, is very impressive. It can lift 6 kg and includes a tool head to fit different grippers and actuators. It also measures the force applied by the gripper.

This year’s task 4, requiring robots to remove 10 objects and place them outside the crop on the headland, was the toughest of 18th Field Robot event. Only 3 teams managed to start in this task, but all failed to perform the required action. CERES II won because it damaged the least plants, Bullseye became second and Carbonite third.

The first winner of the Basic Navigation task of the online international Field Robot event is Beteigeuze Nova. They managed to finish the entire virtual field in 2:22 minutes, with only four plants damaged! The second place went to Carbonite, the 2019 base navigation winner. Bullseye came in third.

The Field Robot Event is a partner of the DLG Feldtage event. The DLG is streaming this event live on its digital platform.
Information on how to participate:
• Attending this virtual event is free of charge and requires a simple registration on DLG’s digital platform.
• Registration is open from June 7.
• The link to the registration is available here.


Team: amaizDTU.
Technical University of Denmark, Department of Electrical Engineering.
Team Captain: Ruijie Ren.

Team: Banat Robot.
Universitatea de Stiinte Agricole si Medicina Veterinara a Banatului “Regele Mihai I al Romaniei” din Timisoara, Agricultural Machines & System Engeneering.
Team Captain: Tucudean Adrian-Ionut.