Team: TAFR robotics.
Zavod 404.
Team Captain: Tim Kambič.

Team: TAFR robotics.
Zavod 404.
Team Captain: Tim Kambič.

Team: MS UAS Team.
Münster University of Applied Sciences,
Department of Mechanical Engineering.
Team Captain: Piet van der Meulen.

Team: ERIC.
Harper Adams University,
Engineering Department.
Team Captain: Chris GORDON.

Team: Banat Robot.
Politehnica University Timisoara,
Automation and Applied Informatics.
Team Captain: Crisan Eliza.

Team: Field Robot Event Design Team.
TU Braunschweig,
Institut für mobile Maschinen und Nutzfahrzeuge.
Team Captain: Christian Schaub.

Team: Die Allrounder.
University of Hohenheim,
Technology in crop production.
Team Captain: Timo Grupp.
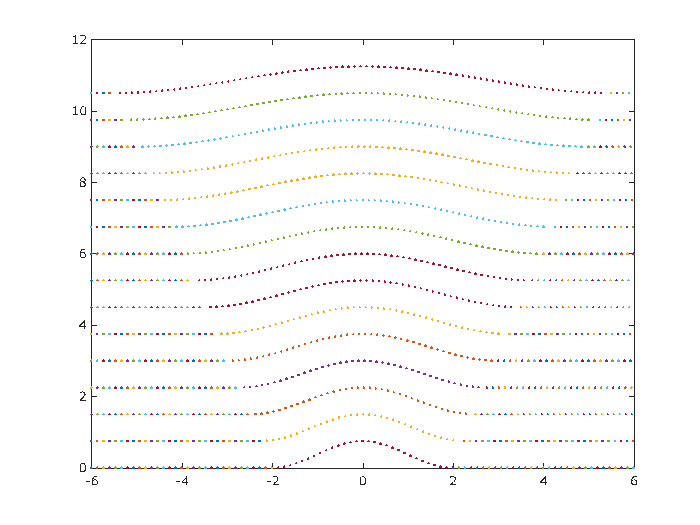
Because of some questions about task 3, we clarified the rules and assessment of task 3, Field mapping. The new version of the task descriptions can be found in Downloads. The changes are marked yellow/green.
There are no straight rows this year. The actual layout of the row pattern is shown in this picture.
We extended the registration deadline by 1 week. So the new deadline is Friday, May 24th.
Registered teams are asked to provide us with a short description of their robot including a photo for the program booklet (technical specifications, special features etc.). A text template is now available under ‘Downloads’.
We stress the point, that you will not be allowed to participate when you do not provide the short description latest 24th of May 2019.
[acceptance Agree]I agree
[submit “Send”]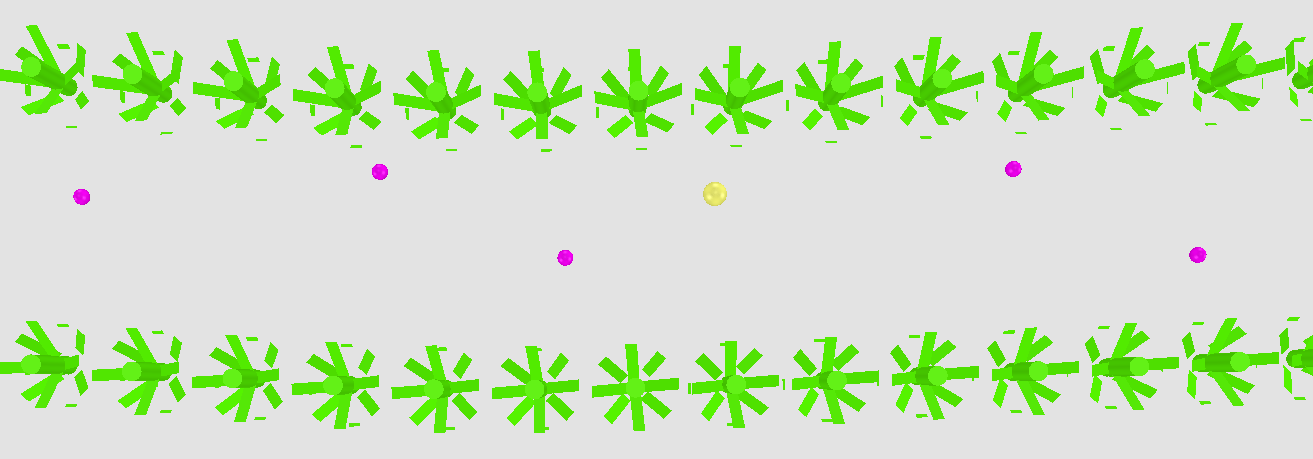
There are major changes in task 3 and 4:
For task 3, the robots are navigating autonomously. The robots shall detect weed patches represented by pink golf balls and obstacles represented by yellow tennis balls. Task 3 is conducted on the area used in task 2 with straight rows. The map created in this task will be used in task 4. Up to ten obstacles may be placed in the field, either between rows or in the headland. Obstacles must not be passed regardless of whether the robot can do so without touching them. Up to ten weeds may be placed in the field. All weeds will be placed between rows. The rules for entering the field, moving the robot, using remote controller etc. are the same as in task 1 and task 2.
In task 4 the main robot should be equipped with a crop sprayer capable of spraying water.
The robot may use the map created in task 3 to produce an optimised path that allows it to spray all of the weeds in the shortest possible time. Teams will be allowed 10 minutes to configure their robot for spraying and load an optimised path into its navigation system. The path optimisation process can be completed using a computer that is independent of the main robot, but this process must be completed within the 10 minute time window.
Alternatively, the robot may go without a map or an optimised path. Without an optimised path, it is more difficult to complete the task within 3 minutes.
The robots shall precisely spray the weeds mapped in task 3. It is not permitted to touch or pass the yellow tennis balls.
Hello everyone,
The place will be BUGA (www.buga2019.de). It will be from 17.06. till 21.06. on the BUGA area in Heilbronn.
At the moment we are planning the tasks. They will be very similar to the last events, so there should be no surprise in the task description.
Greetings from Heilbronn

Lazer Maizer!

1: Carbonite,
2: Beteigeuze,
3: The Great Cornholio.
1: Maizerunners,
2: Carbonite,
3: Beteigeuze.

1: Maizerunners,
2: Steketee Bullseye,
3: The Great Cornholio.
{kind=link}