Register your team for FRE 2019 by filling out the registration form on our website (through the Event tab in the menu above).
News
Major changes in task 3 and 4
There are major changes in task 3 and 4:
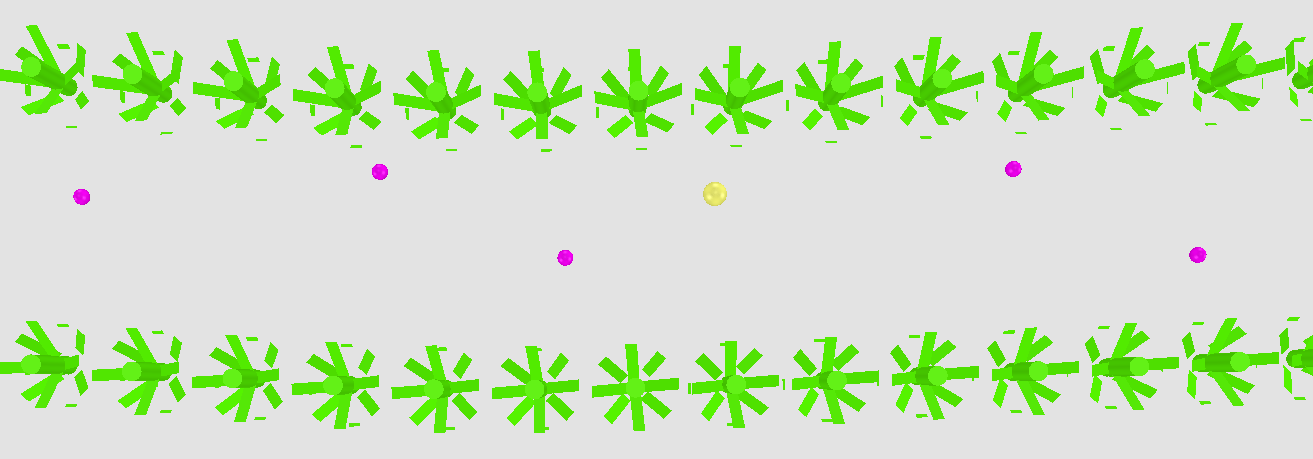
For task 3, the robots are navigating autonomously. The robots shall detect weed patches represented by pink golf balls and obstacles represented by yellow tennis balls. Task 3 is conducted on the area used in task 2 with straight rows. The map created in this task will be used in task 4. Up to ten obstacles may be placed in the field, either between rows or in the headland. Obstacles must not be passed regardless of whether the robot can do so without touching them. Up to ten weeds may be placed in the field. All weeds will be placed between rows. The rules for entering the field, moving the robot, using remote controller etc. are the same as in task 1 and task 2.
In task 4 the main robot should be equipped with a crop sprayer capable of spraying water.
The robot may use the map created in task 3 to produce an optimised path that allows it to spray all of the weeds in the shortest possible time. Teams will be allowed 10 minutes to configure their robot for spraying and load an optimised path into its navigation system. The path optimisation process can be completed using a computer that is independent of the main robot, but this process must be completed within the 10 minute time window.
Alternatively, the robot may go without a map or an optimised path. Without an optimised path, it is more difficult to complete the task within 3 minutes.
The robots shall precisely spray the weeds mapped in task 3. It is not permitted to touch or pass the yellow tennis balls.
FRE at BUGA 2019
Hello everyone,
The place will be BUGA (www.buga2019.de). It will be from 17.06. till 21.06. on the BUGA area in Heilbronn.
At the moment we are planning the tasks. They will be very similar to the last events, so there should be no surprise in the task description.
Greetings from Heilbronn

topagrar Design Award winner 2018
Lazer Maizer!

Results Free Style task 2018
1: Carbonite,
2: Beteigeuze,
3: The Great Cornholio.
FRE 2018 Overtall Ranking
1: Maizerunners,
2: Carbonite,
3: Beteigeuze.

Results Task 4 “Soil-engaged Weeding” 2018
1: Maizerunners,
2: Steketee Bullseye,
3: The Great Cornholio.

Results Task 3 “Selective Sensing” 2018
1: Beteigeuze,
2: Maizerunners,
3: Lazer Maizer.

Results Task 2 “Advanced Navigation” 2018
1: Carbonite,
2: Beteigeuze,
3: TAFR.

Results Task 1 “Basic Navigation” 2018
1: Carbonite,
2: Maizerunners,
3: FloriBot.
The Field Robot Event
The Field Robot Event shows a vision of the future of modern precision agriculture. Right now, a small revolution is taking place. A new breed of robots will soon be able to carry out a variety of tasks in row crops, such as weeding, spraying and disease monitoring. Agricultural robots working in a field, completely autonomous: the Field Robot Event proves this is possible!
We invite students, professionals and other participants to enter our annual international open-air field robot contest: the only open-air agricultural field robot contest in the world.
The contest allows unlimited creativity: no restrictions apply to the robot design and construction. As we have seen during the previous Field Robot Events, our participants know how to be creative!
The Field Robot Event includes a contest, of course, but exchanging experiences and networking are an important part of the program, too. Everyone who is interested in robots is welcome to come and enjoy the Field Robot Event!