The next international Field Robot Event 2020 (18th edition) will be in Erwitte/Lippstadt in Germany again together with the DLG Field Days on Tuesday 16th to Thursday 18th of June 2020. On behalf of the organising committee, we invite you to come with a student and/or professional team and participate in the event.
We joined the DLG Field Days already several times. The Field Days always focus on relevant topics in crop management & machine demonstrations. More information you find here on this webpage.
There will
be special tasks for the robot competition in 2020:
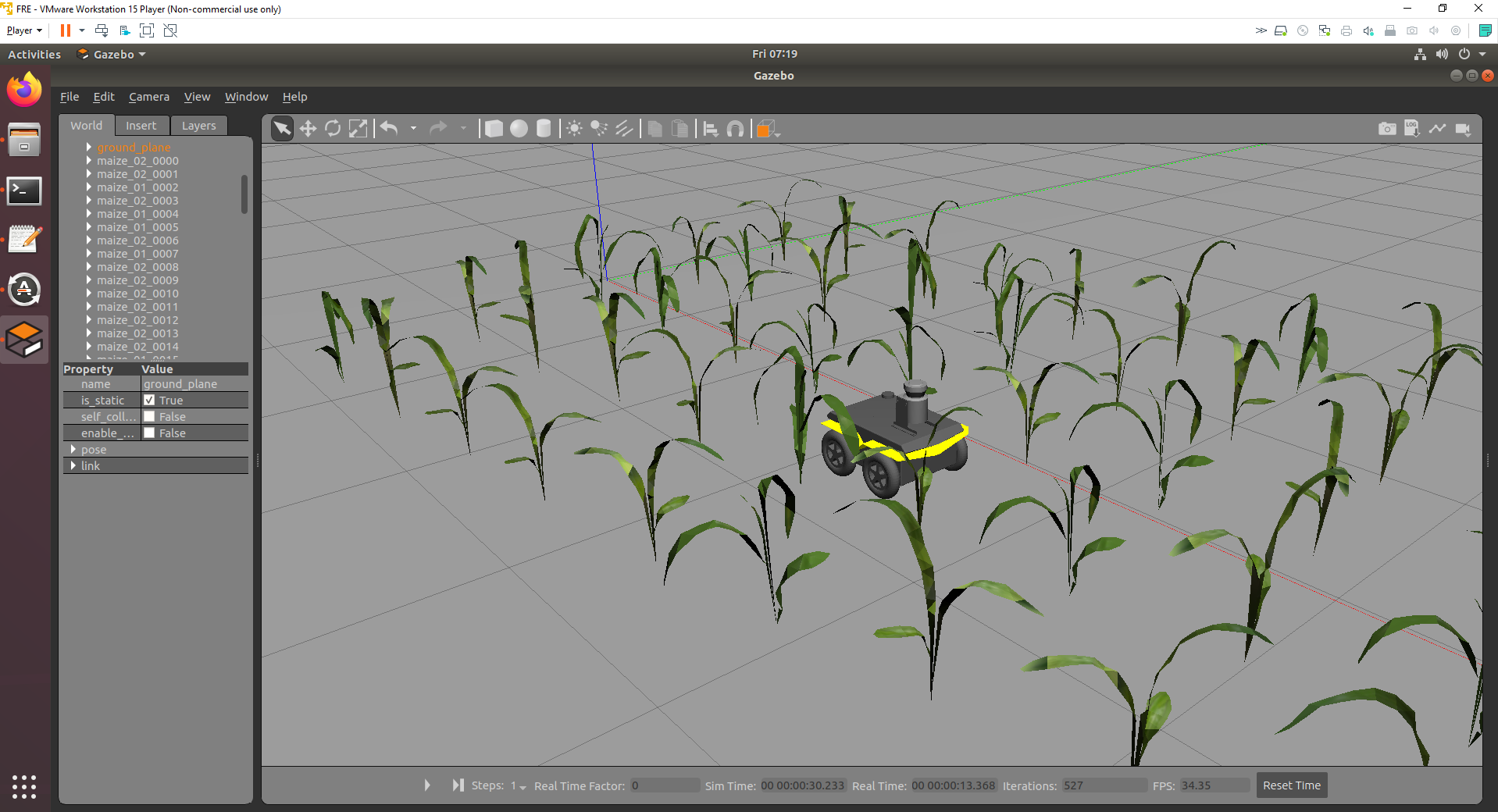
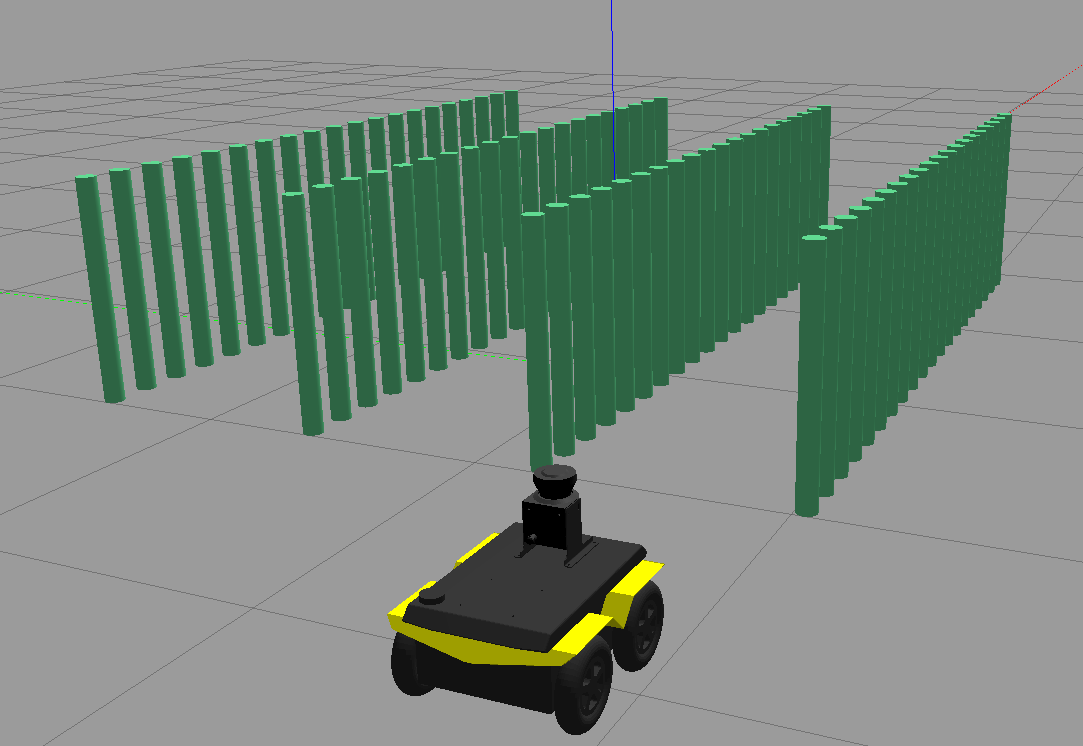
– CONTEST: We will as soon as possible (probably in January) provide more details about the tasks. So far we inform you that we will focus first on the traditional challenges of navigating (task 1 and 2). In 2020 we will not anymore navigate through maize rows but between matured small pumpkins in rows. They will be arranged also in 75 cm row width but with around 40-50 cm spacing within the row. An example of the ‘crop plants’ you find here, they will perhaps vary in size and color.
For the
application tasks 3 and 4 we suggest something new. The crop plants (pumpkins)
from task 1 and 2 will be used within an artificial small landscape. This
landscape patch will have some structures as consisting power poles, small
trees, a pond etc. In task 3 the robots shall find the crop plants and provide
information about them: number, position coordinates, volume etc. In task 4 the
robots should again find the crop and move them out of the spot (harvesting).
The Free
Style as task 5 will be as usual, we suggest. The banning of persons within the
field during machine performance will continue. The ground condition is not
clear yet. Perhaps it will be well maintained grass turf or it will be bare
soil.
The extra
design awarding which is independent from the contest performance will be
continued.
– DEMO: We
will invite more companies and research institutions to present their research
prototypes, however they look as small or big. There will be some demonstration
time schedules to show how the status is within this area of (close to)
commercialization.
– TALKS: We
will also invite speakers from our domain to give impressions about the
state-of-the-art of robotics in agriculture. We will try to include also some
team speakers to present whatever is interesting in relation to the FRE. The
talks will be on or close to our contest area to allow students to listen
whenever they have time. The FRE-talks will be included on the official DLG
forum announcements.
Providing
accommodation & catering will be the same as previous years. We will try to
keep the total costs per student as event fee including everything – except
your own travel costs – as low as possible. It will be not more than 100 euro
per student. That’s it so far.
Hopefully
you are coming and join us and have an interesting time with us. Winning is
good, but learning, having fun & talks with colleagues is also nice. If you
have any further good idea let us know, there is still some time to adjust.















{kind=link}